产品简介
Product Introduction



全方位立体重构(国际首创);
无需对焦,全景深拍摄;
超高清拼图:10亿像素级,可达100亿级;
多点位(数千点)拍摄与自动跟踪;
远距离拍摄位姿操控与自动拍摄设定;
高精度热成像与可见光图像像素级对齐;
与遥感图片配合建立高精度立体图像;
容易增加多频谱仪等其他多模态传感器;
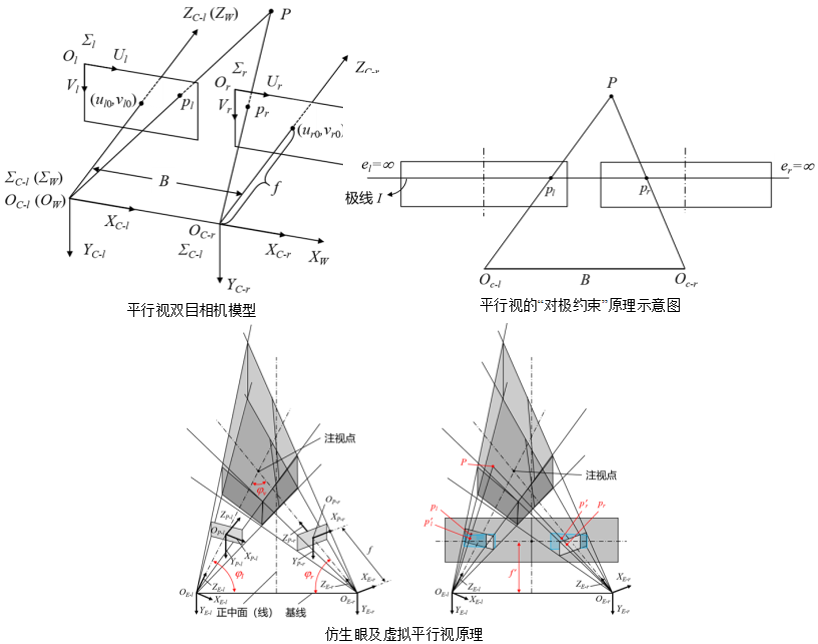
生物鹰眼具有诸多特性,例如鹰眼即可以帮助老鹰在千米高空清楚看到地面的兔子等猎物,同时当老鹰低空快速飞行捕获猎物时,还具有良好的立体视觉能力帮助准确定位猎物位置。仿生鹰眼希望可以吸收生物鹰眼的诸多优势来帮助机器人获得宽视距范围的视觉系统。
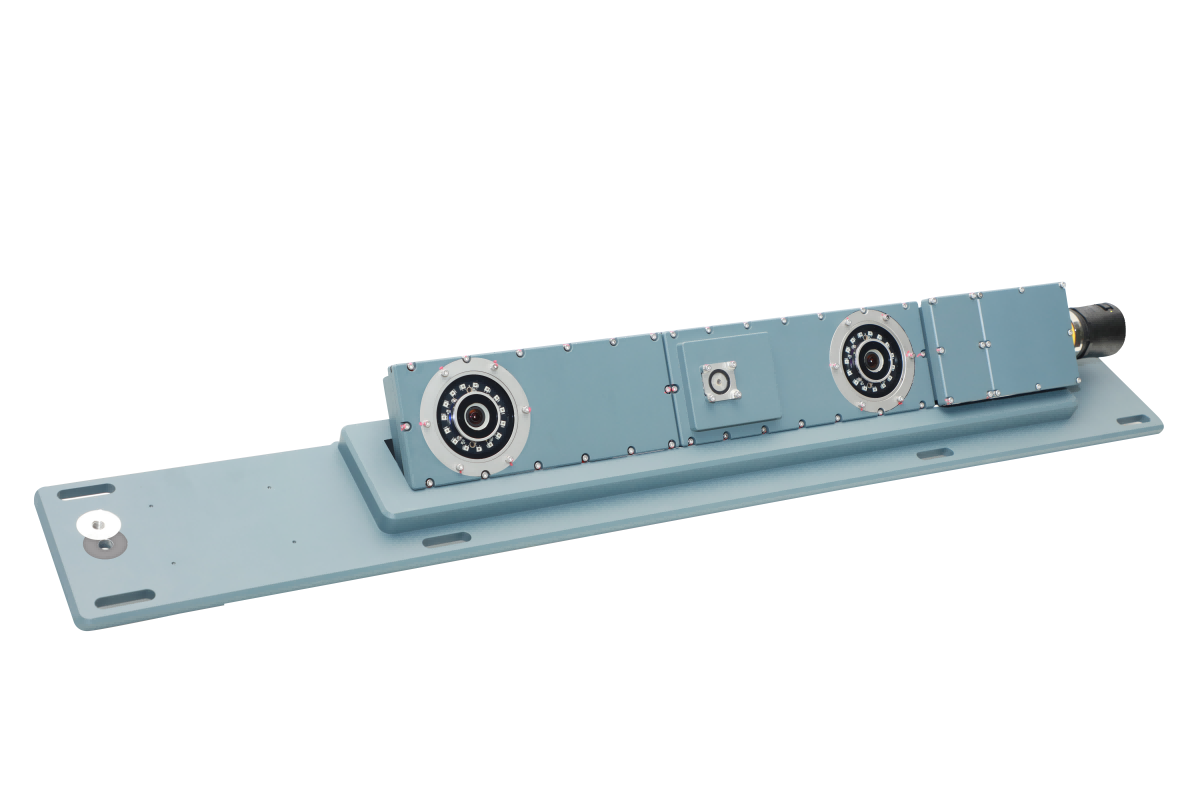
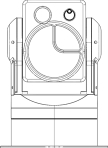
仿生鹰眼以发展成熟的可动仿生眼系统为基础,通过搭载多套视觉系统实现由宽到窄,由远及近的多维目标清晰观测,主要包括远焦摄像头用于观察远距离目标、中远焦摄像头用于观察中远距离目标物体、广角摄像头用于观察近距离目标。搭载的远红外热像仪可以获取物体温度数据,可以大大提升动物或者活体监测等任务效率,同时热成像支持18种伪彩模式,可与RGB图像像素级融合,配合内置及外置计算平台还可实现检测、识别、区域入侵判别等多种智能分析功能。此外,两轴高精度云台系统结合仿生眼衍生而来的动眼标定技术还可以实现超远距离的精准定位测距等功能。
鹰眼SDK软件提供包括设备控制、模块参数调节(相机参数、电机参数等)、状态数据获取与设置、图像数据获取等在内的各种交互接口;
SDK支持获取各视觉传感器实时图像视频的获取,可实时观看设备图像及视频等数据信息;
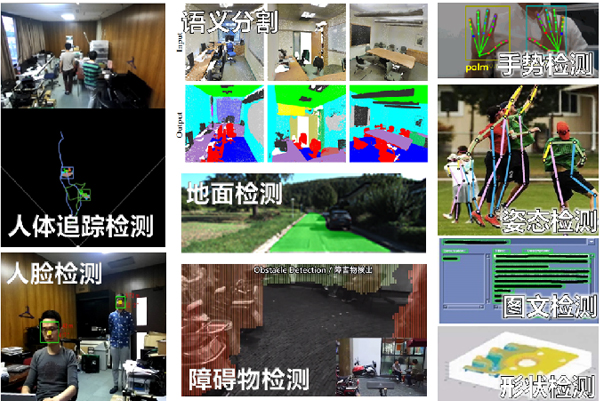
SDK支持获取视野内人、车、船等指定目标的检测结果,并能够设置相关注视、跟踪、定位等功能;
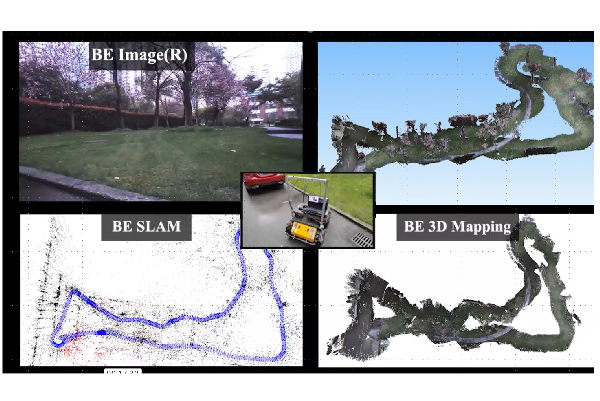
SDK提供相应接口获取指定目标定位坐标、场景3D重建等结果(需要至少两台鹰眼,并完成部署及初始化准备工作,部分结果需要外部算力支持);
SDK支持Linux平台、支持ROS,支持c/c 、python语言开发
产品信息
Product Information
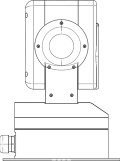
| 单鹰眼尺寸 | 23cm*23cm*36.8cm |
| 重量 | 12Kg |
| 功耗 | 30w(平均功耗),100w(峰值功耗) |
| 单鹰眼转动范围(两轴) | -25°~+90°(Pitch)、360°连续旋转(Yaw) |
| 最大运动速度 | 360°/s |
| 转角分辨率 | 0.0056° |
| 可见光摄像机分辨率 | 2560*1440,1920*1080,1920*1080 |
| 红外热像仪 | 640*512 |
| 高清图像观测像素数 | >10亿 |
| 观测距离 | 0.5m~2km |
| 观测范围 | 1m范围外无死角观测 |
| 全范围高清观测周期 | <1小时 |
| 测距精度误差 | 0.5% |
| 视觉观测频率 | 25Hz |
| 红外观测频率 | 25Hz |
| 多传感器同步误差 | <50us |
| 增稳 | 具备自增稳能力, 可在设备处于一定频率震动情况下保持图像稳定 |
| 接口 | 电源口(DC,24v,5A),网口(对外数据交互与远程控制等),自定义 接口(多鹰眼设备互连交互用) |


场景方案
Scenario scheme