产品简介
Product Introduction






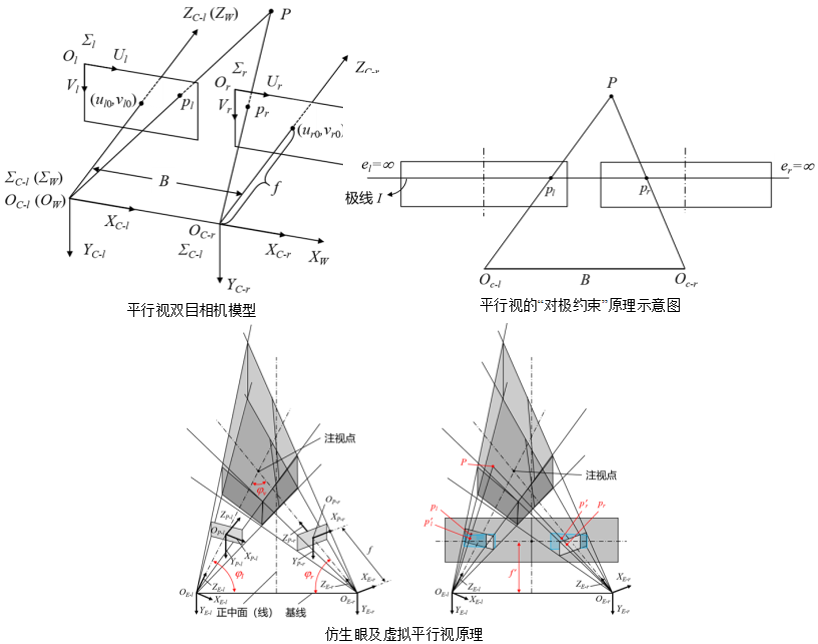
灵活六运动自由度,兼具极大视角和高清分辨率;
多目标间快速注视、切换、追踪;
实时校准3D显示输出;
颠簸环境保持“眼球”稳定;
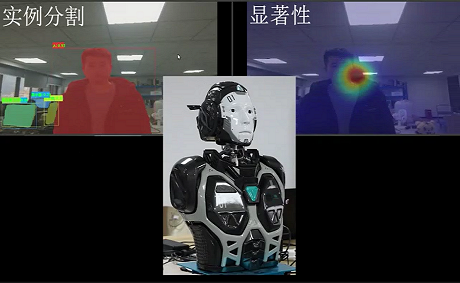
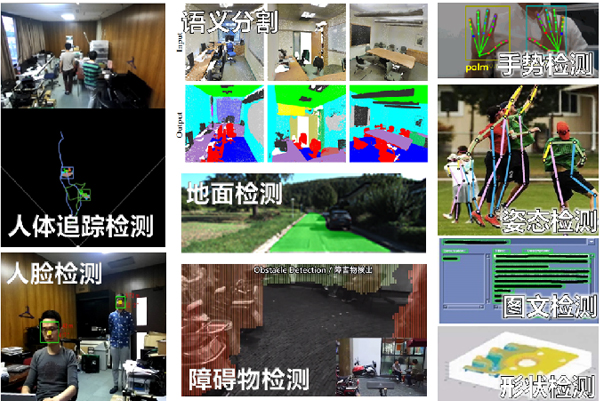
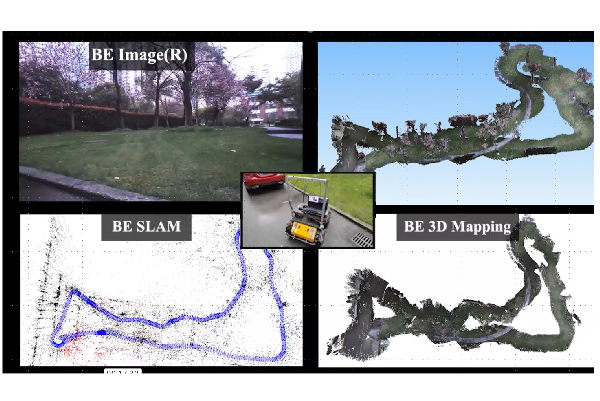
支持实时三维重建、物体检测识别;
支持避障导航等所有固定双目算法功能;
安徽爱观视觉科技有限公司研制的仿生双眼视觉系统是基于对人眼的生物结构、运动神经控制系统的深入研究仿生实现而成,具有避震、检测识别、注视跟踪、3D重建、避障导航等诸多特性,旨在为动态复杂场景下的机器人、无人机、无人车、安防等领域提供可靠、高性能、通用化、智能化的视觉系统解决方案。
支持windows/Linux,支持C /Python语言二次开发
提供ROS开发包(支持ROS kinetic/ ROS melodic)
提供可动眼标定工具、仿生眼配置工具、仿生眼可视化控制工具等软件包
提供丰富的源码例程及各类算法功能demo,并可选配导航避障等算法功能解决方案包(后续推出)
产品信息
Product Information
全局快门,硬件同步
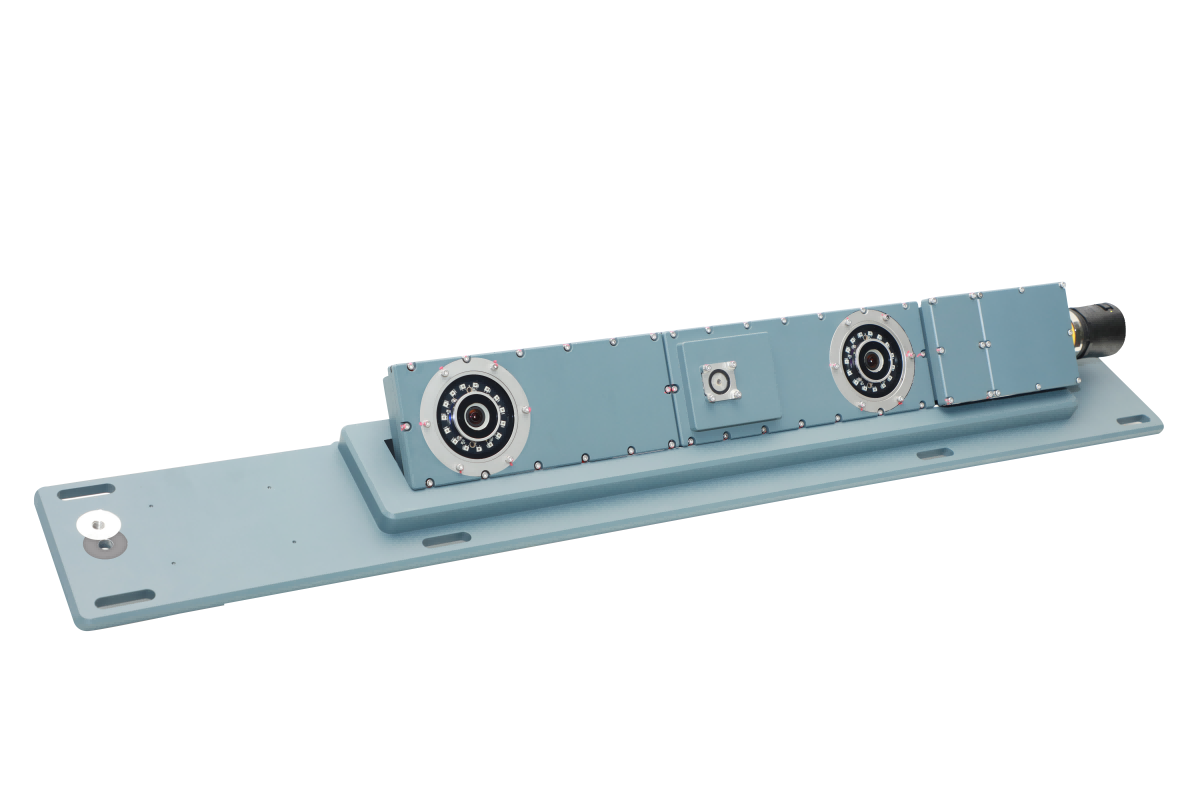
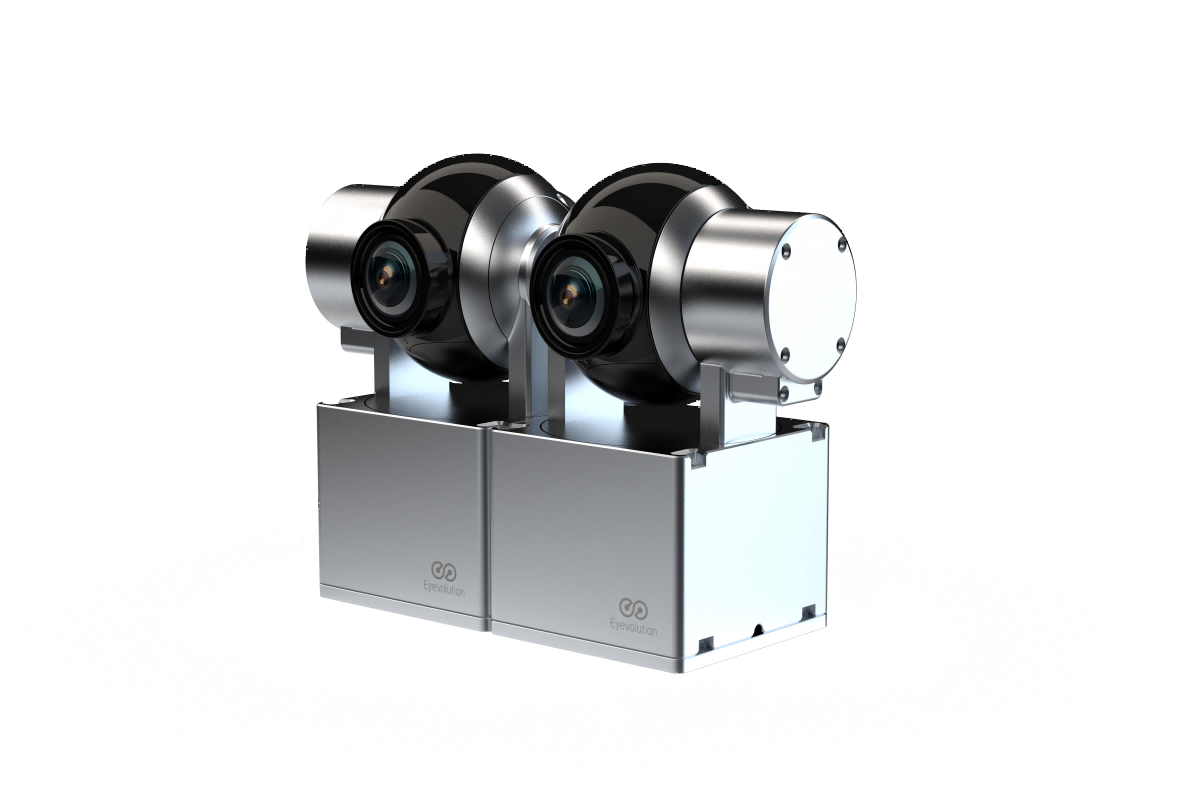
版本 | 串联 | 并联 |
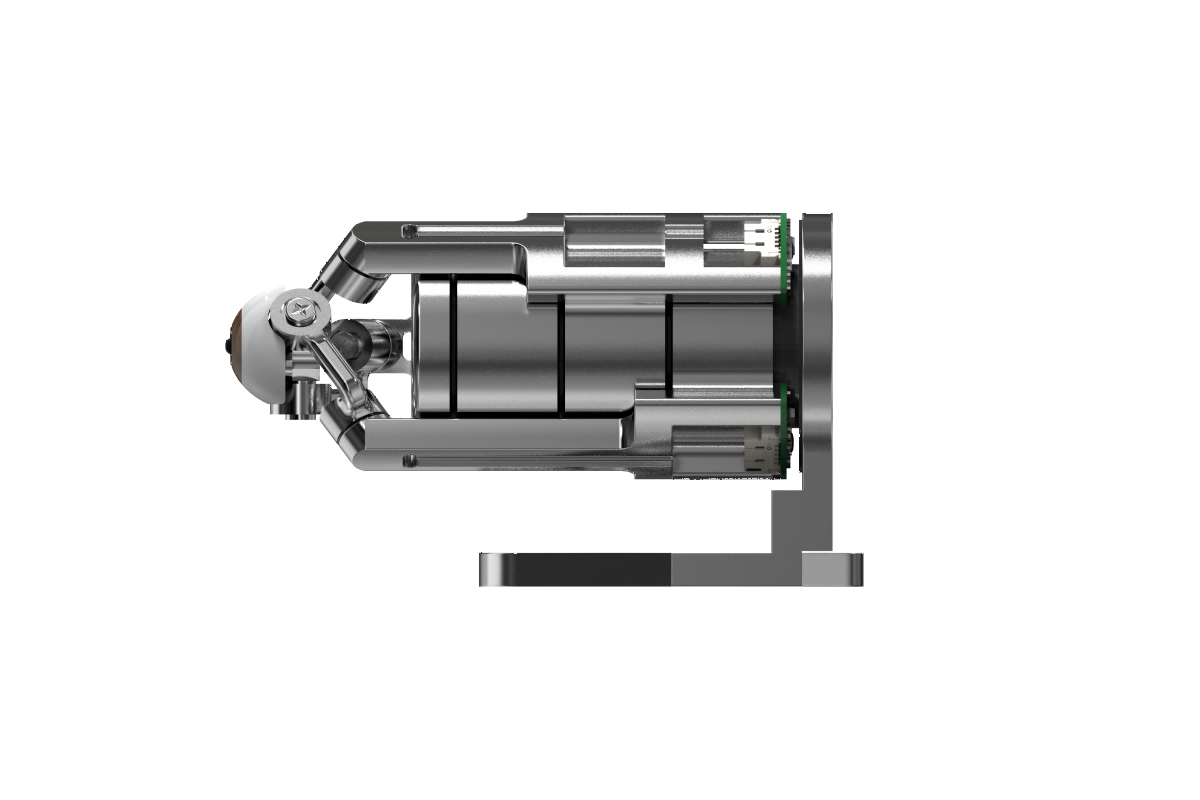
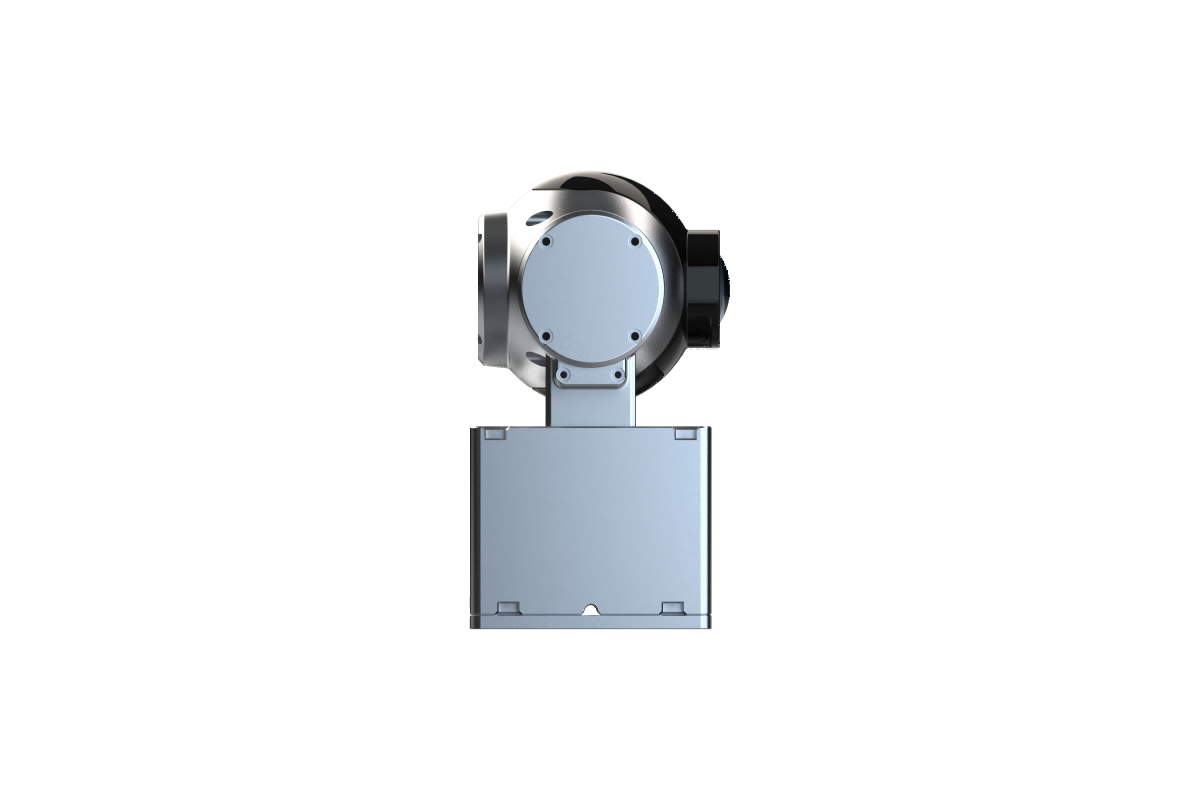
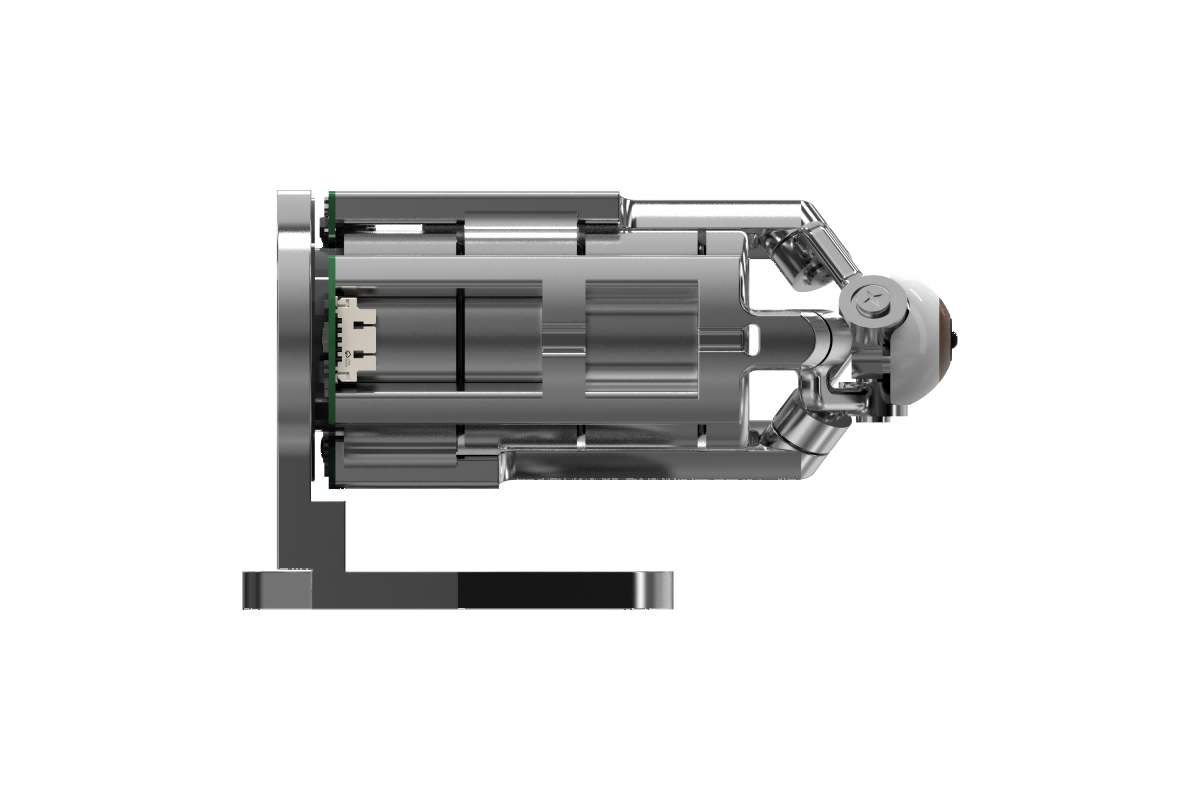
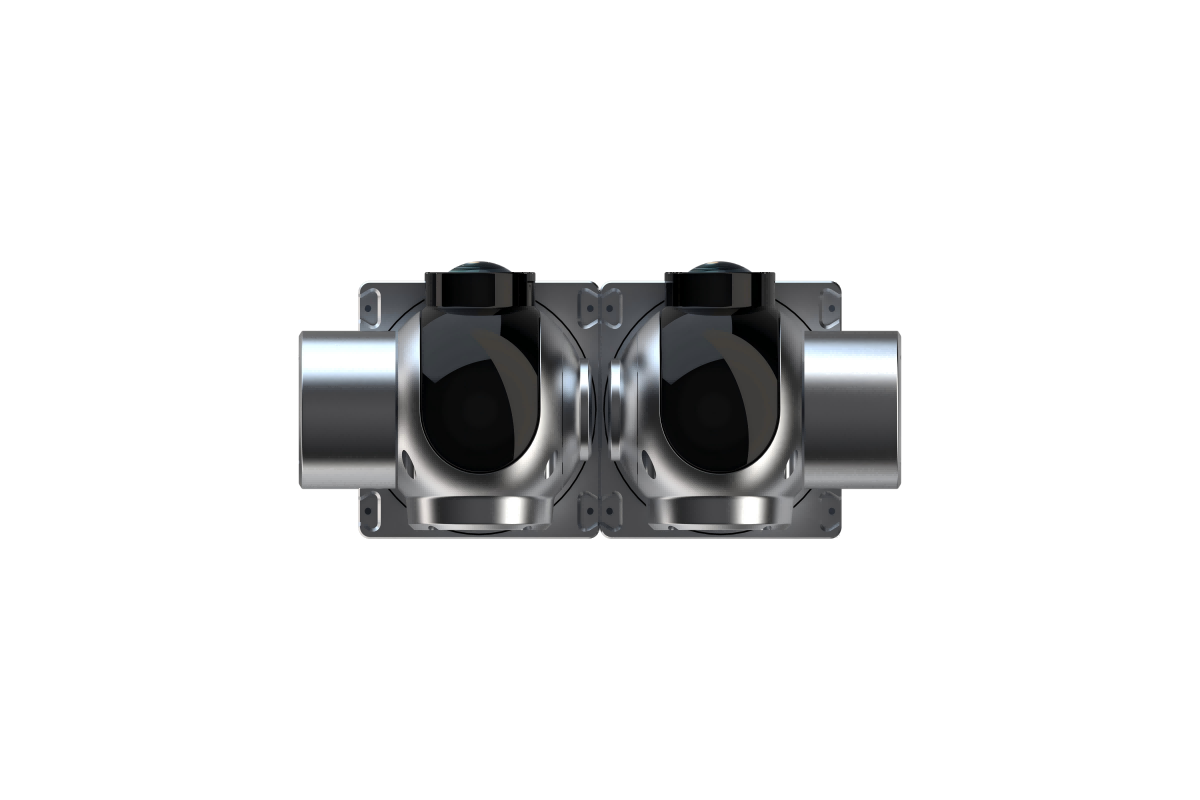
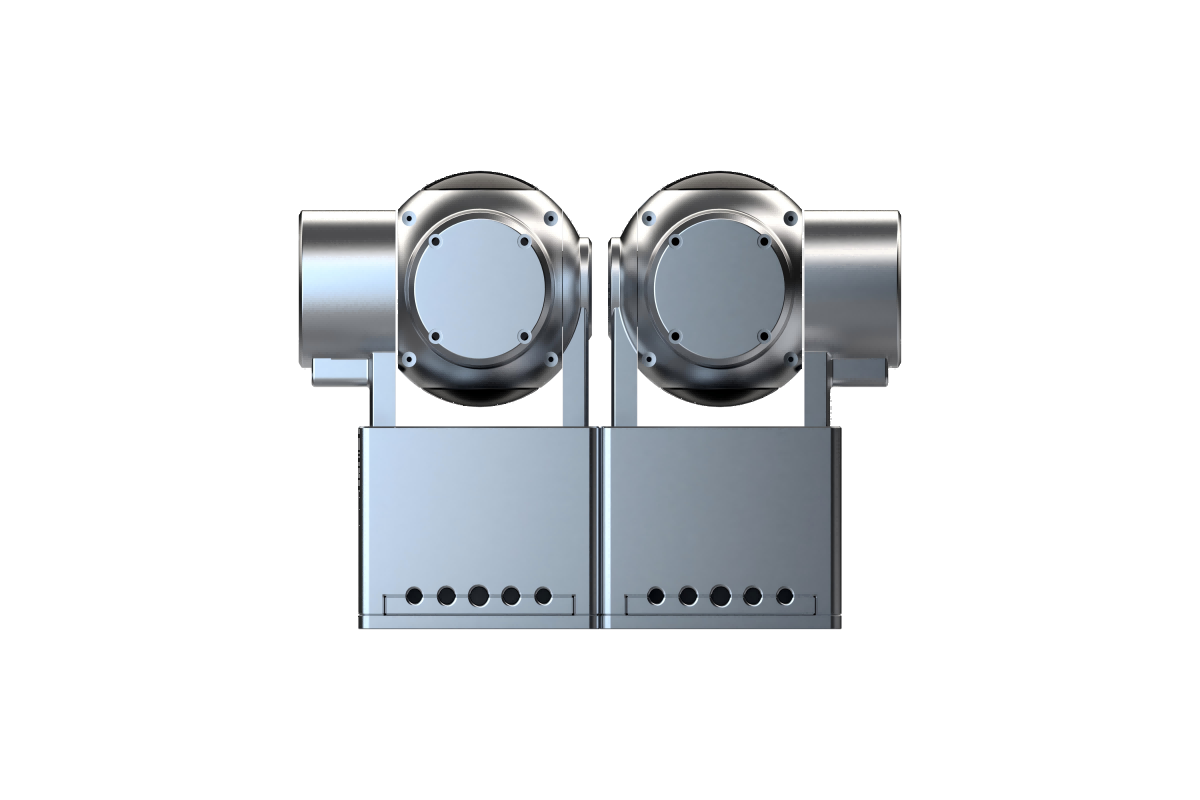
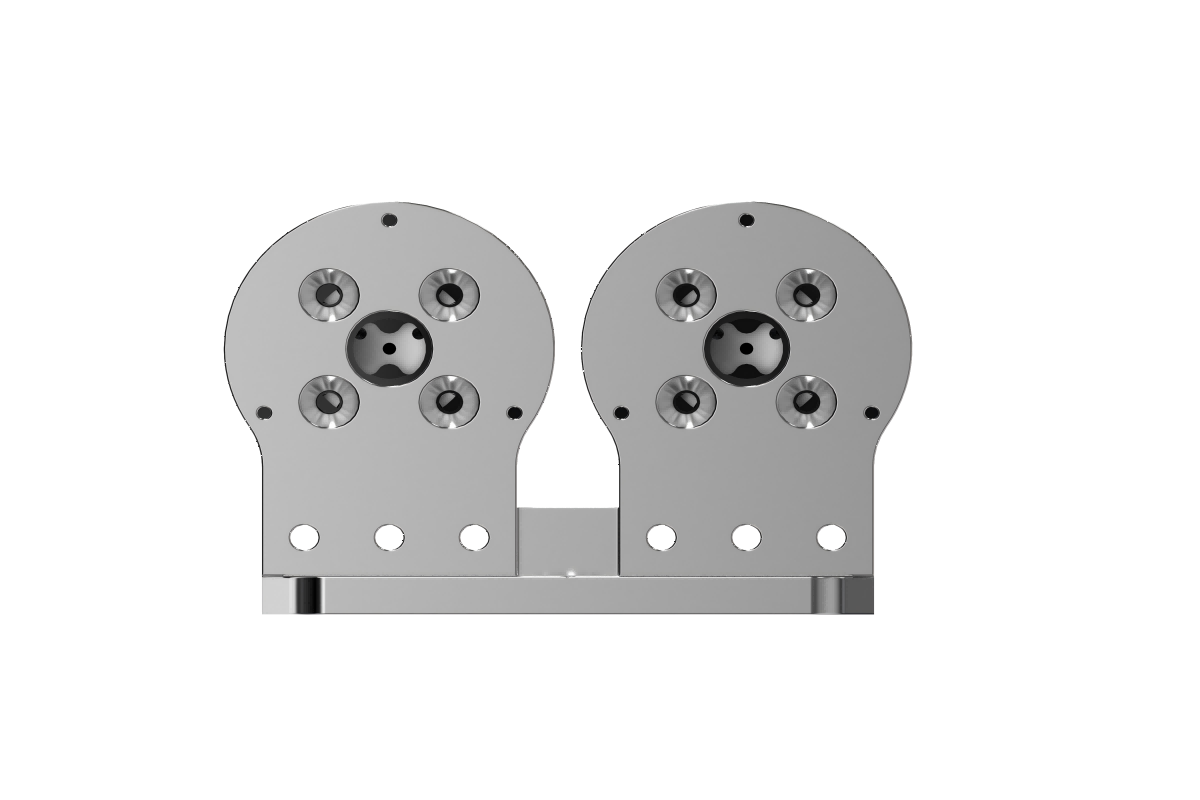
| 型号 | Binosense S520 | Binosense P320 |
产品图片 |
|
|
尺寸 | 187mm * 75mm * 133mm | 100mm*85mm*50mm |
运动自由度 | 左右眼各Pitch\Roll\Yaw方向的三个自由度 | 左右眼各Pitch\Roll\Yaw方向的三个自由度 |
电机运动精度 | ±0.0056° | ±0.0045° |
支持的运动类型 | Saccade、Smooth Pursuit、VOR等眼球运动 | Saccade,Smooth Pursuit,VOR等眼球运动 |
眼睛闭环控制频率 | 1000Hz | 500Hz |
摄像头视场角度 | 58 °(水平),45 °(垂直) | 100°(水平)、80°(垂直) |
最大视角 | 118 °(水平),105 °(垂直) | 150°(水平)、130°(垂直) |
| 最大运动角速度 | 720°/s | 720°/s |
| 可选眼球直径 | 19mm(默认)、25mm、30mm | |
摄像头 | 单眼1440*1080@200fps 彩色 | 单眼1600*1200@25fps 彩色 |
快门同步 | 全局快门,双眼图像硬件同步 | 卷帘式快门、双眼图像同步采集 |
工作基线 | ≥75mm | ≥40mm |
工作距离 | ≥0.3m | ≥0.2m |
系统 | 支持Linux/Windows二次开发,支持ROS开发 | 支持Linux/Windows二次开发 |
二次开发语言 | c ++/python | c++ /python |
同步精度 | 双眼图像与电机同步误差<5μs,图像与IMU同步误差<1ms | |
支持的基本功能 | 直接及远程网络连接控制,同步绑定数据采集,多机器同步和协作 | 直连及远程网络连接控制、同步绑定数据获取、多机协同、左右眼同步运动、左右眼视线汇聚功能、左右眼目标跟踪功能、相机图像参数调节、相机录像和抓图功能 |
其他功能 | 高精度眼动标定,支持大部分眼球运动,支持所有固定双目算法和功能 | |
扩展和功能 | 支持拓展例如GPS、温度传感器等模块,支持外部信号源同步或提供同步信号源 | 支持拓展例如IMU、GPS、温度传感等模块;深度图及点云坐标输出、标定功能等 |
接口 | USB3.0*2 , USB2.0*1,1 * DC接口*1 | DC,HDMI,USB,网口 |
安装和固定 | 支持正装、侧装及吊装 | 支持正装、侧装及吊装 |
重量 | 约2.2kg | 0.6kg (含底座及外壳) |
| 功耗 | 24V 5A | 12V 5A |
| 硬件平台与开发 | BinoSense P320使用主要有两种方式:一种是需要搭配工控机(例如Nvidia嵌入式平台)直连驱动使用;还可以支持客户使用远程网络连接的方式远程连接仿生眼,两种模式均提供linxu、windows SDK,支持ROS开发,可以控制眼球运动或者采集数据等,SDK还可提供上述提及的各类算法。 |


场景方案
Scenario scheme