立体视觉技术

产品简介
Product Profile
立体视觉技术
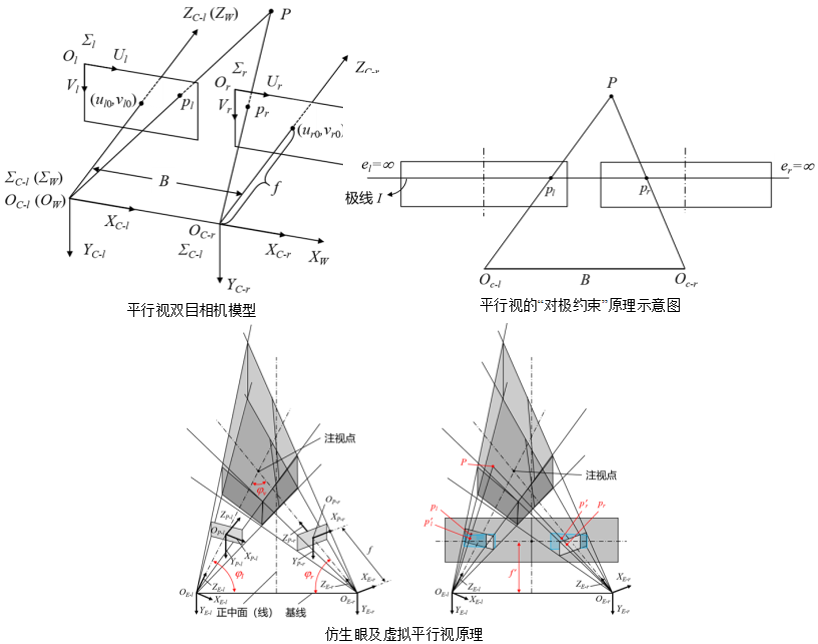
双目立体视觉技术原理是基于同一目标在左右眼(相机)中成像的位置偏差(又称为视差)来获取该目标的距离。
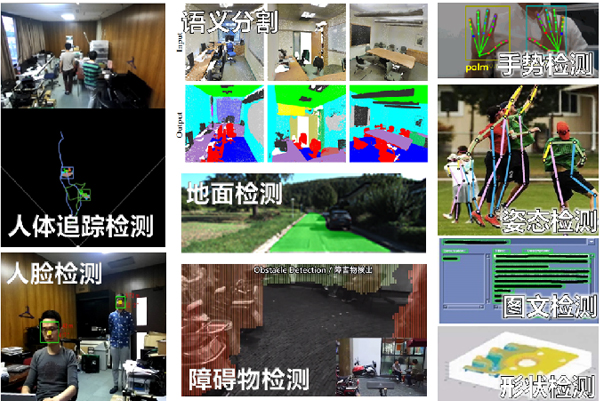
相对于单目视觉,双目视觉在可以完成所有单目视觉的功能前提下,将感知信息由二维提升到三维,可以完成更多的视觉算法功能,通过精准的环境感知,帮助系统完成智能决策。
中国工业机器视觉产业发展白皮书认为,3D视觉将成为“继黑白到彩色、低分辨率到高分辨率、静态图像到动态影像后的第四次视觉技术突破”。
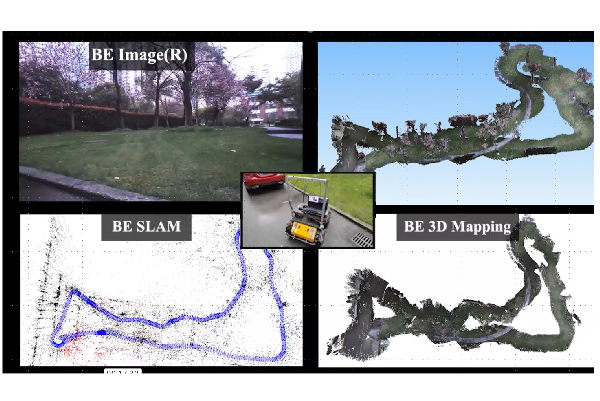
本公司突破了棋盘格标定(张氏标定法)的限制,研发成功了动态标定和轴眼标定以及虚拟平行视的原理,在国际上首次实现了动态双眼的高性能立体视觉。由于动态双目立体视觉系统的出现,使远距离大范围的立体视觉成为可能,特别是运动载体上使用仿生眼,可以消除所有运动模糊,同时保证清晰的目标永远在视野范围内,从而使机器视觉如同生物眼一样适用于所有机器。因此,视觉技术的第五次突破将会被认为是“静态双目立体视觉到动态立体视觉的突破”。
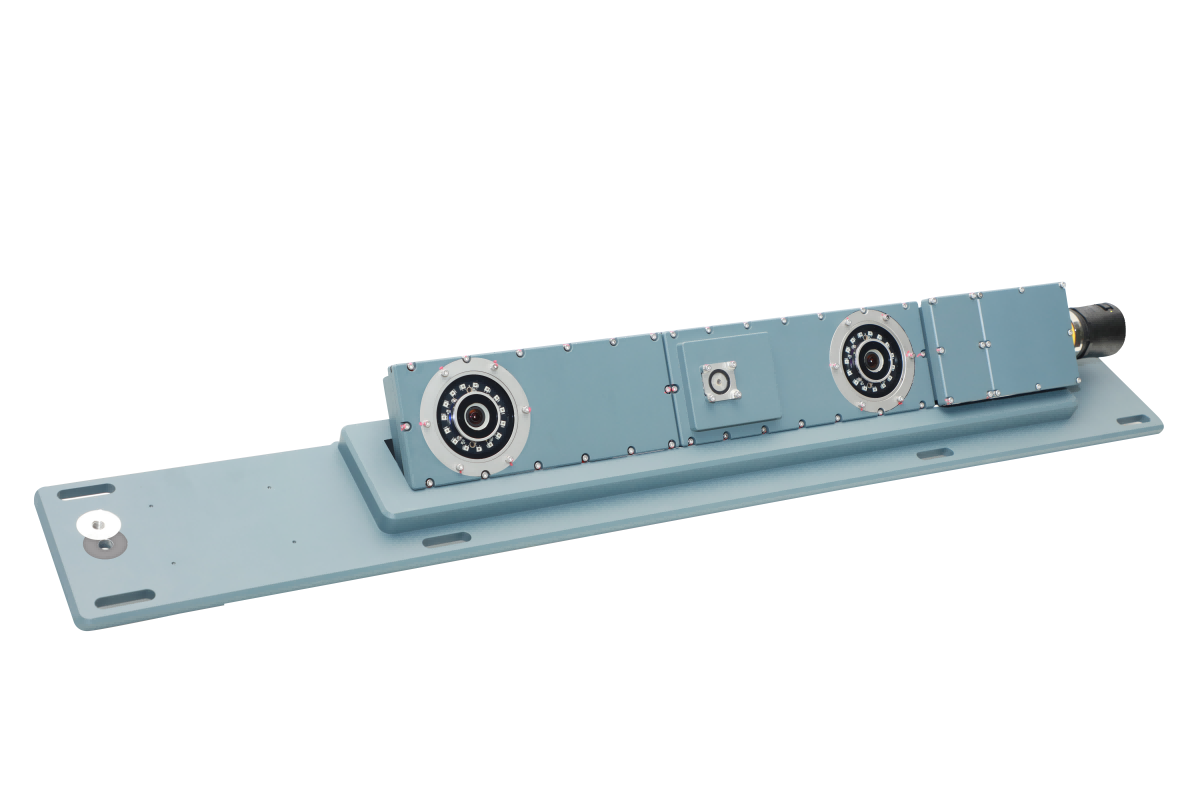
与传统双目视觉技术不同,本团队具备高精度实时在线标定技术,极大的扩展了双目视觉的应用场景。该技术可解决传统固定双目器件在高温、震动等环境中使用时结构形变的问题;可以解决长基线双目标定困难的问题;也可以解决基于仿生双眼技术研制的仿生眼在相机位置或焦距变化时带来的内外参变化的问题。
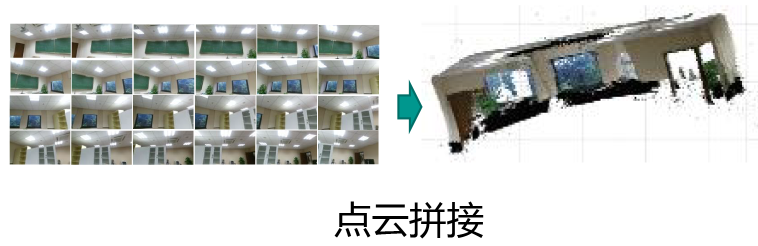
同时,团队具备的在线标定技术以及稠密三维重建技术均可在嵌入式平台上达到实时运行的效果。