

爱 观 视 觉 科 技
发展惠及社会 梦想创新未来
01
产品与服务 / 产品的质量保证

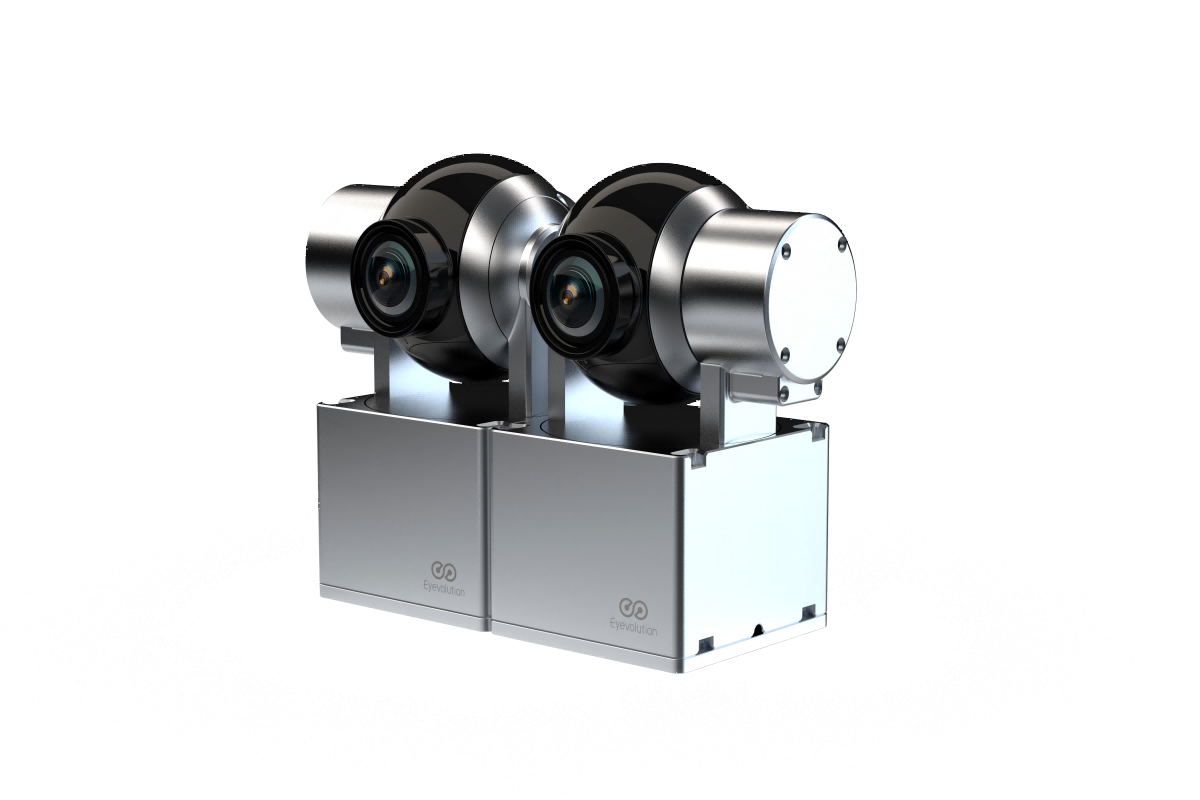
并联版(BinoSense Parallel version)
灵活六运动自由度,兼具极大视角和高清分辨率;
多目标间快速注视、切换、追踪;
实时校准3D显示输出
颠簸环境保持“眼球”稳定
支持实时三维重建、物体检测识别
支持避障导航等所有固定双目算法功能
串联版(BinoSense Series version)
灵活六运动自由度,兼具极大视角和高清分辨率;
多目标间快速注视、切换、追踪;
实时校准3D显示输出
颠簸环境保持“眼球”稳定
支持实时三维重建、物体检测识别
支持避障导航等所有固定双目算法功能

鹰眼
全方位立体重构(国际首创);
无需对焦,全景深拍摄;
超高清拼图:10亿像素级,可达100亿级;
多点位(数千点)拍摄与自动跟踪;
远距离拍摄位姿操控与自动拍摄设定;
高精度热成像与可见光图像像素级对齐;
与遥感图片配合建立高精度立体图像;
容易增加多频谱仪等其他多模态传感器;

领晰(LeadSense) 双目相机
高清全局快门, 内置9轴IMU传感器,最高120fps
LeadSense为双目被动式3D传感器模块。
通过左右两个相机采集的图像,可以实时高帧率输出高分辨率的双目图像和相应的深度图。
可用于室内或者室外环境,适用于机器人/无人机导航,图像分析,3D测量,自动仓库等领域。

轨道交通
国内首家仿生双目多传感技术融合一体化监控设备开发商
世界高水准的三维重建技术
大基线标定技术
像素级图像处理和深度学习网络多层融合技术
可实现在线动态自校准功能
深度融合红外、紫外、激光、光纤、惯导等多源信息技术
体积小、重量轻、功耗低、易安装的特性
具有实时性、全面性、可拓展性、可互换性

智能机器人
AMR (Autonomous Mobile Robot)是指可以智能理解环境,并在其中自主移动的机器人
多传感器融合感知
免维护设计
视觉导航及识别
现场无需调整,快速精准识别目标
360度防碰撞传感
多机协作
布局优化
根据工单大数据完成调度优化方案
安徽爱观视觉科技有限公司(原上海爱观)成立于2016年,创始人张晓林博士带领其团队从事20多年的机器视觉、仿生控制、神经网络的研究,从类脑仿生学角度重新定义了机器视觉,他提出的仿生双目视觉从应用角度对现有的视觉产品有着非常巨大的颠覆性,对于机器视觉在各个行业的应用起到很好的促进和推动作用。
公司成立初以海外归国博士团队为基础,在国内不断传播推广类脑智能和仿生视觉的产品理念的同时,现在已形成150多人的研发团队规模,并且通过融资和股权合作等形式将团队的原成果转化企业转为业务子公司。
公司在自主研发技术的基础上,新产品及技术服务已在三维视觉检测、智能视觉导航、影视拍摄制作、虚拟现实、智慧城市、智能教育等领域取得了应用突破口,陆续会针对行业更新换代的技术需求推出系列产品。公司同时注重与行业上下游的龙头企业进行合作,现已与新松机器人,科大讯飞等人工智能领跑企业合作,合作成果已在工博会等获得创新金奖。
核心理论
公司核心团队不断完善仿生双眼视觉的理论体系,通过人类双眼视觉控制神经系统的结构和原理的解析,建立用于机器人双目协调运动控制的完整数学模型。并在该模型基础上,结合视网膜的信号处理机制、小脑、大脑等的信息处理功能,实现高度智能化的仿生双眼视觉感知。
-
2016年
成立时间
-
150+人
团队规模
-
20+年
行业研究
-
12个
产品链
03
视频中心 / 多领域、多方向前沿研究,快速打通AI在各个垂直场景中的应用,向行业赋能








-
06-23
2026中科院派“机器鹰”去墨脱巡山了!!! -
04-17
2026热烈祝贺爱观视觉科技有限公司在《上海市域崇明线工程车辆采购项目弓网检测产品采购》中成功中标! -
02-10
2026爱观视觉科技2026年终盛典圆满落幕——致敬奋斗,共启新程 -
01-15
2026爱观视觉亮相2026世界未来能源峰会,AI视觉技术助力全球能源转型 -
12-03
2025中国仿生双目立体视觉系统闪耀东京!爱观视觉首秀日本机器人展 -
11-24
2025爱观公司新研发的小型仿生眼已正式上市! -
09-11
2025我司携仿生视觉新品惊艳亮相2025外滩大会,引领感知科技新变革 -
06-26
2025喜报!爱观视觉研制的串联仿生眼(BinoSense S510)荣获2025红点产品设计大奖 -
06-12
2025让机器人拥有一双慧眼,“仿生眼”在上海接力支持下投入应用 -
04-28
2025“让AI像人一样思考”背后,类脑智能如何让脑科学与人工智能“双向奔赴” -
04-24
2025观察|首个半马落幕:人形机器人场景应用才刚站上起点 -
04-14
2025热烈祝贺《仿生眼》新书报告会 暨仿生视觉产业与投资研讨会成功举办 -
04-09
2025产品宣传册 -
03-27
2025爱观视觉重磅亮相2025 VisionChina 上海展,以仿生视觉方案赋能智能制造 -
03-21
2025《仿生眼》新书发布会暨上海大学仿生视觉与类脑智能研究所成立仪式,诚邀参与! -
11-27
2024爱观视觉献礼宝山世外五周年校庆 -
09-24
2024喜报 |热烈祝贺爱观视觉荣获“2024全国颠覆性技术创新大赛”优秀奖 -
07-31
2024张晓林:仿制大自然最精密聪慧的作品——仿生眼 -
05-24
2024BinoSense R300人形机器人“小黑”亮相BEYOND Expo 2024 -
04-03
2024爱观的人形机器人“小黑”惊艳亮相2024中国人形机器人生态大会。 -
01-24
2024喜报|热烈祝贺我司荣获“国家高新技术企业”认定! -
01-10
2024权威认证 | 热烈祝贺公司通过ISO/TS 22163:2017&ISO9001:2015轨道交通质量管理体系认证 -
12-21
2023喜报|热烈祝贺爱观视觉荣获2023年度合肥高新区雏鹰企业 -
09-21
2023双目立体仿生视觉系统亮相工博会 -
08-03
2023《上海轨道交通弓网检测设备增购项目(2标)》成功中标 -
03-06
20232019世界机器人大会圆满落幕,安徽爱观视觉展台吸引众多观众驻足观看,展品反响热烈! -
02-28
2023为机器人装上“眼睛” ——第18届中国国际工业博览会上展出可动双目产品