Product Introduction
Product Introduction






Flexible six degrees of freedom of motion, combining great viewing angle and high-definition resolution;
Fast fixation, switching, and tracking between multiple targets;
Simultaneouscalibration of 3D display output
Maintain eye stability in bumpy environments
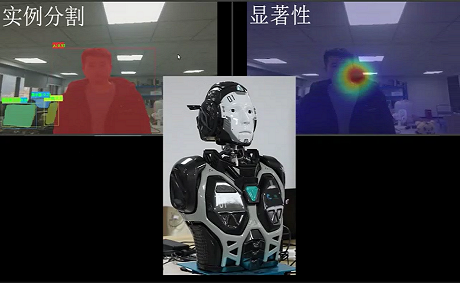
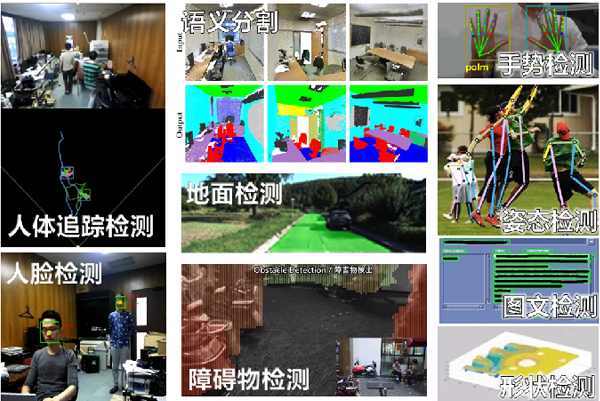
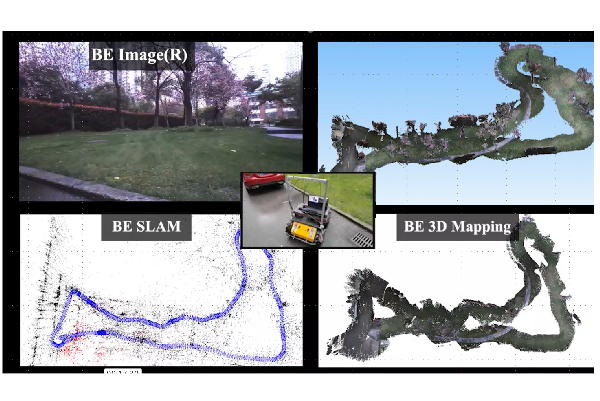
Supports real-time 3D reconstruction, object detection, and recognition
Supports all fixed binocular algorithm functions such as obstacle avoidance navigation
The biomimetic binocular vision system jointly developed by Eyevolution and research institutes are based on in-depth research on the human eye's biological structure and motion neural control system, and is realized through biomimetic simulation. It has many characteristics such as shock absorption, detection, and recognition, gaze tracking, 3D reconstruction, obstacle avoidance navigation, etc. It aims to provide reliable, high-performance, and universal solutions for robots, drones, unmanned vehicles, securities, and other fields in dynamic and complex scenes Intelligent visual system solution.
Supports Windows/Linux, supports secondary development of C /Python language
Provide ROS development package (supporting ROS kinetic/ROS multimedia)
Provide software packages such as movable eye calibration tools, biomimetic eye configuration tools, and biomimetic eye visualization control tools
Provide rich source code routines and various algorithm function demos, and optional navigation obstacle avoidance algorithm function solution packages (to be launched later)
Product Information
Product Information
| Version | Series | Parallel |
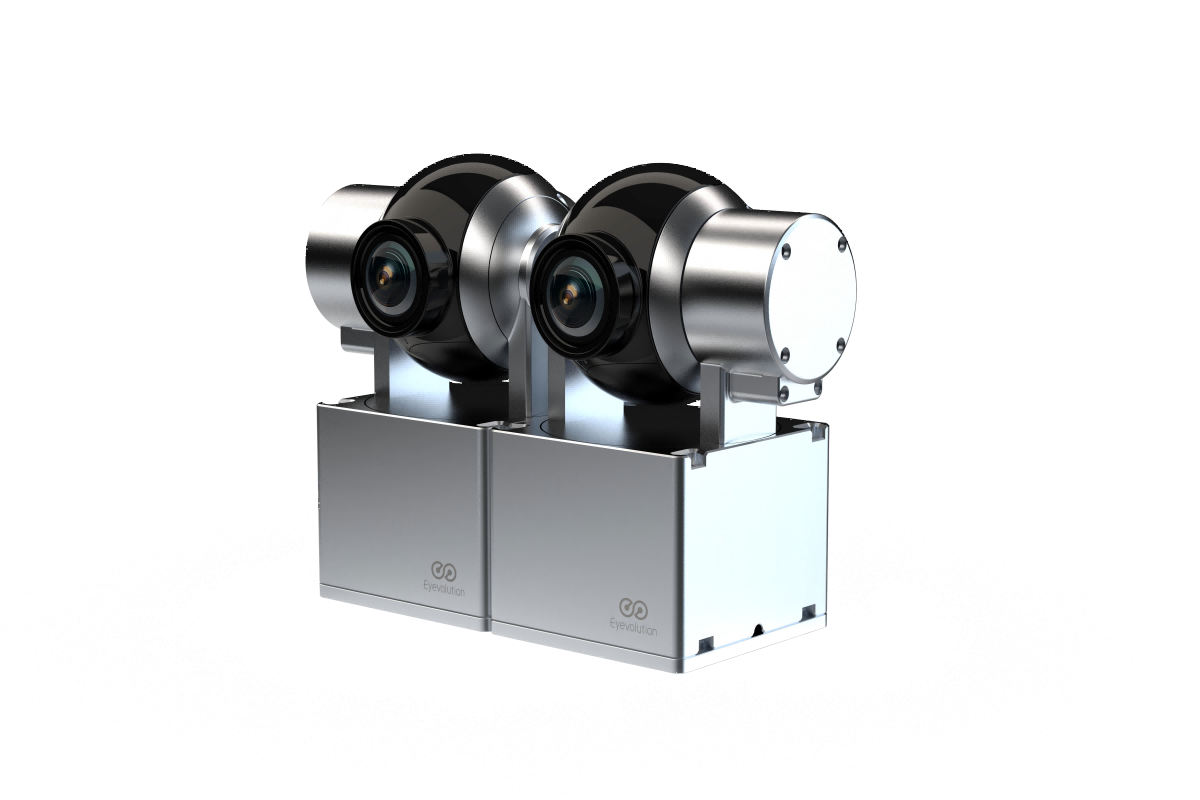
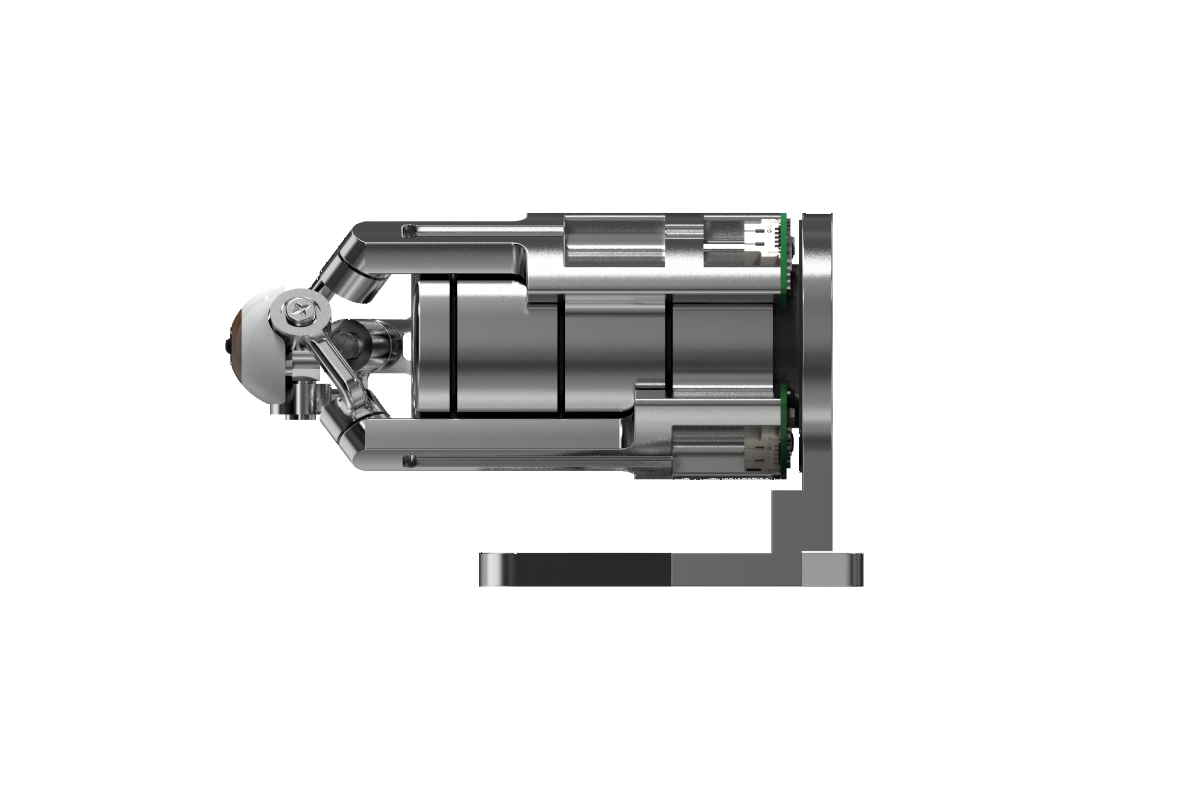
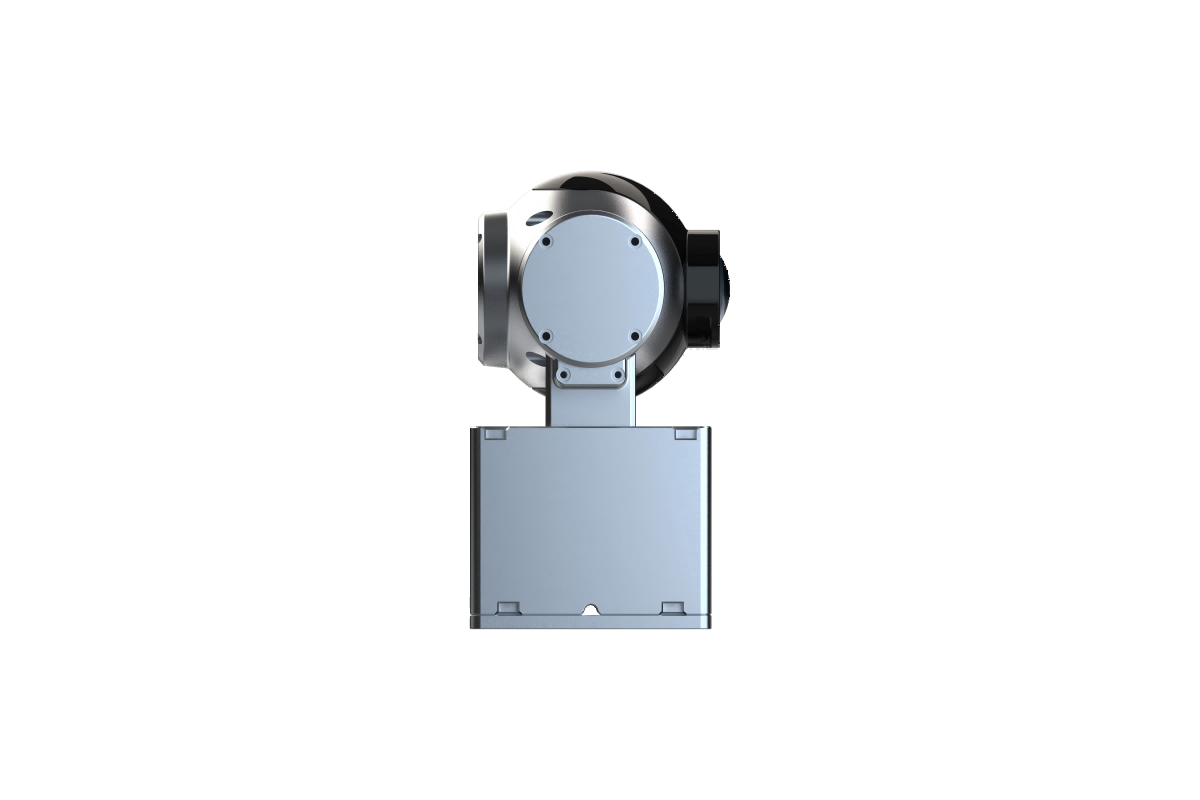
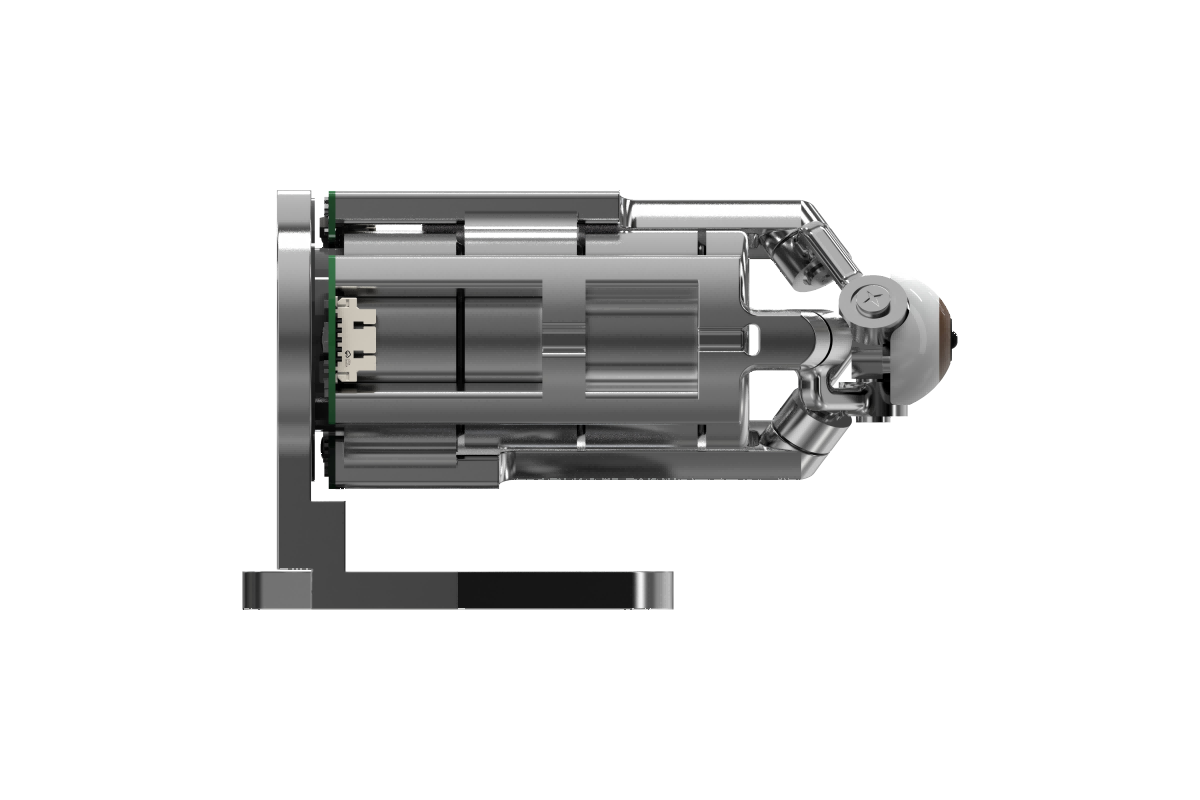
| Model | Binosense S520 | Binosense P320 |
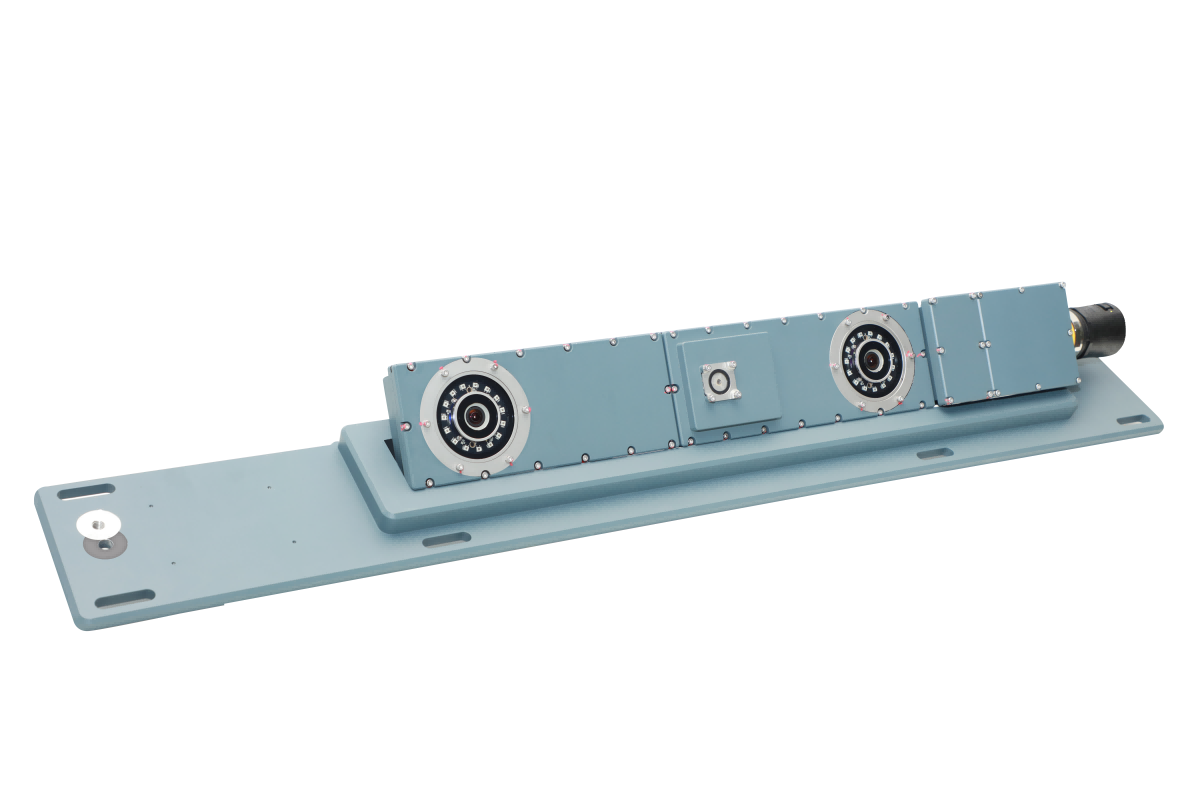
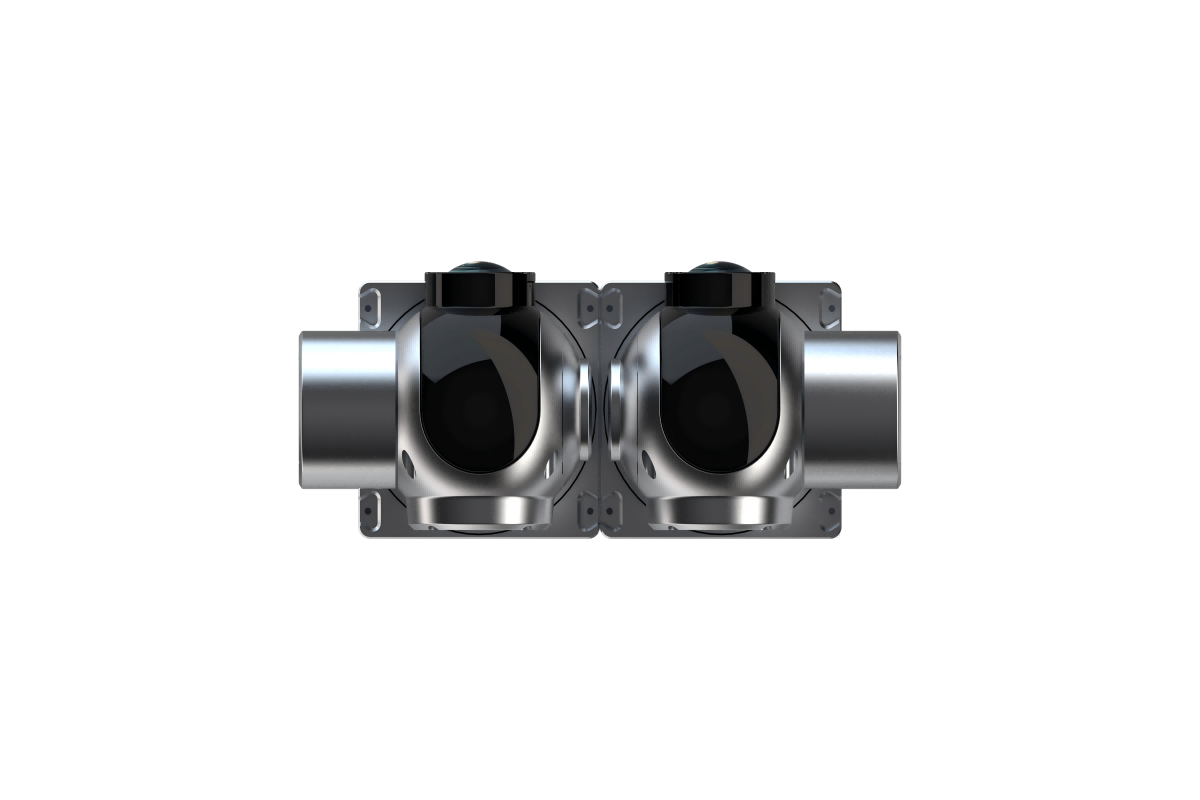
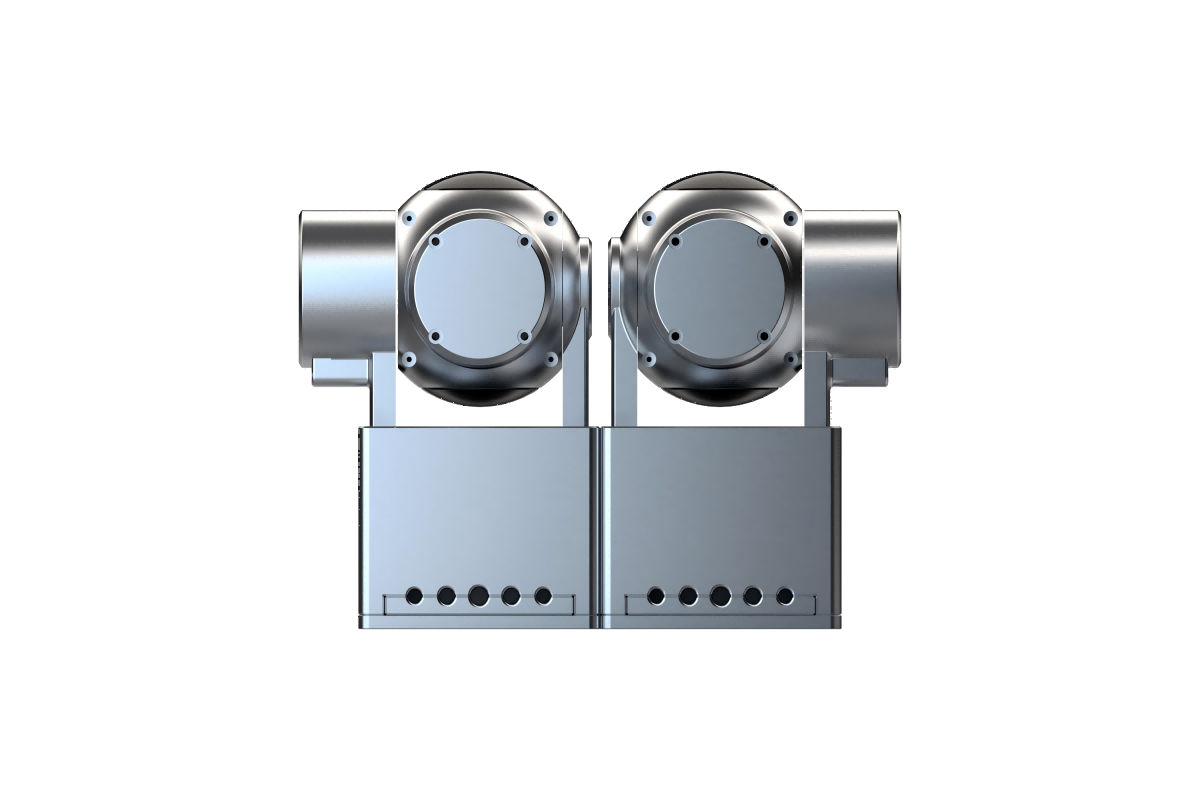
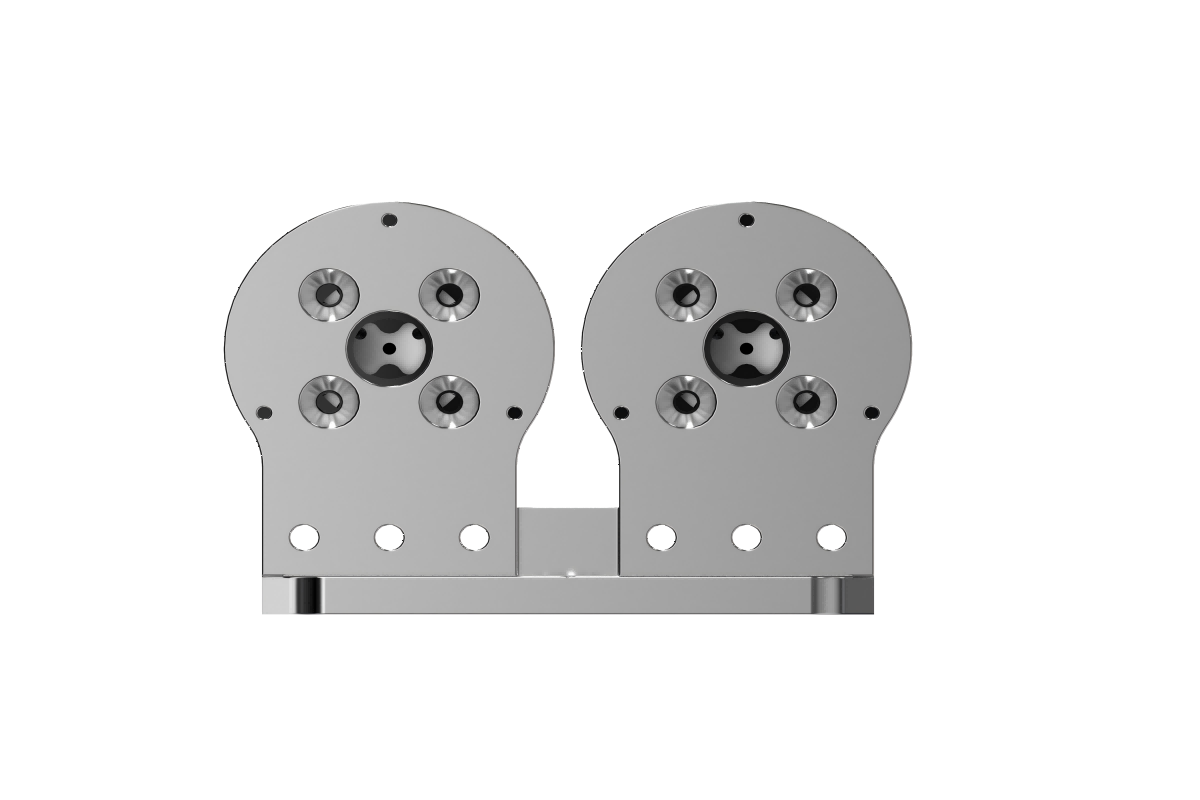
Product picture |  |
|
Size | 187mm * 75mm * 133mm | 100mm*85mm*50mm |
Freedom of motion | Three degrees of freedom for each Pitch, Roll, and Yaw of the left and right eyes | Three degrees of freedom for each Pitch, Roll, and Yaw of the left and right eyes |
Motor motion accuracy | ±0.0056° | ±0.0045° |
Support for sports types | Ocular movements such as Saccade, Smooth Pursuit, VOR, and convergence | Ocular movements such as Saccade, Smooth Pursuit, SV, etc |
Eye closed-loop control frequency | 1000Hz | 500Hz |
Camera field of view angle | 58 ° (horizontal), 63 ° (vertical) | 100 ° (horizontal), 63 ° (vertical) |
Maximum visual angle | 118 ° (horizontal), 105 ° (vertical) | 150 ° (horizontal), 130 ° (vertical) |
Maximum angular velocity of motion | 720°/s | 720°/s |
| Optional eye diameter | 19mm(default), 25mm, 30mm | |
| Camera | Monocular1440*1080@200fps Color | Monocular 1600* 1200@25fps Color |
Shutter synchronization | Global shutter, hardware synchronization for binocular images | Rolling shutdown, synchronous acquisition of binocular images |
Work Baseline | ≥75mm | ≥40mm |
Working distance | ≥0.3m | ≥0.2m |
System | Support Linux/Windows secondary development and ROS development | Support for Linux/Windows secondary development |
Secondary development language | c++ /python | c++ /python |
Synchronization accuracy | The synchronization error between binocular images and the motor is < 5μs; the synchronization error between images and IMU is < 1ms | |
Support basic functions | Direct and remote network connection control, synchronous calibration data collection, multi-device synchronization and collaboration | Direct and remote network connection control, synchronous calibration data acquisition, multi-device collaboration, left-right eye synchronous movement, binocular gaze convergence function, left-right eye target tracking function, camera parameter adjustment, camera recording and snapshot functions |
Other functions | High-precision eye movement calibration, supports most eye movements, and all fixed binocular algorithms and functions | |
Expansion and functionality | Supports expansion modules (e.g., GPS, temperature sensors); supports external signal source synchronization or provides a synchronous signal source | Supports expansion modules (e.g., IMU, GPS, temperature sensors); depth map & point cloud coordinate output, calibration function, etc. |
Interface | USB3.02, USB2.01, 1DC port1 | DC, HDMI, USB, Ethernet port |
Installation and fixation | Supports front, side and upside-down installation | Supports front, side and upside-down installation |
Weight | Approx. 2.2kg | 0.6kg (including base and housing) |
| Power dissipation | 24V 5A | 12V 5A |
| Hardware Platform and Development | There are two main ways to use BinoSense P320: one is to connect it directly to an industrial computer (e.g., NVIDIA embedded platform) for driver operation; it also supports users to remotely connect to the bionic eye via a remote network connection. Both modes provide Linux and Windows SDKs, support ROS development, and allow control of eye movement or data collection. The SDK also provides the various algorithms mentioned above. |

Scenario scheme
Scenario scheme